Représentation paramétrique et équation cartésienne : cours de maths en terminale en PDF.
Mis à jour le 24 décembre 2025
Les représentations paramétriques de droites et plans de l’espace, ainsi que, les équations cartésiennes à travers un cours de maths en terminale à télécharger en PDF.
des objets jusque-là purement géométriques (points, droites, segments, etc.) dans le domaine algébrique.
Ces objets peuvent désormais être décrits par leurs coordonnées ou leurs équations.
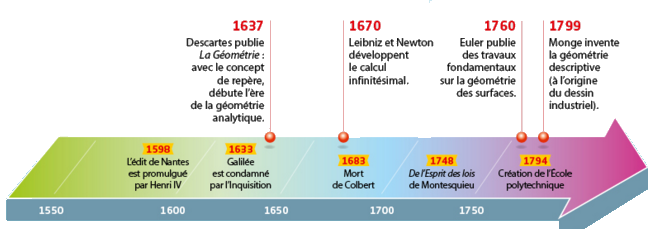
Mais la méthode de Descartes reste limitée au plan, c’est-à-dire à deux coordonnées.
Plus d’un siècle plus tard, vers 1760, Euler et Lagrange développent ces notions dans l’espace
et établissent les équations de droites et de plans de l’espace, en utilisant des repères à trois axes
de coordonnées.
Durant cette période, la géométrie analytique continue de se développer, notamment avec
Gaspard Monge, qui propose plusieurs mémoires à l’Académie des Sciences.
Il résout ainsi divers problèmes géométriques de manière analytique.
I. Représentations paramétriques d’une droite.
 est un repère orthonormé de l’espace.
est un repère orthonormé de l’espace.
1.Principe.
 et qui
et quiadmet pour vecteur directeur le vecteur
 de coordonnées (a ; b ; c).
de coordonnées (a ; b ; c).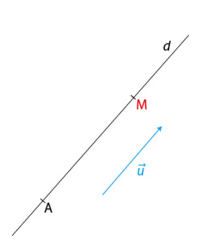
Dire qu’un point M de coordonnées
 appartient à (d), équivaut à dire
appartient à (d), équivaut à direque les vecteurs
 et sont colinéaires, c’est-à-dire qu’il existe un réel t tel
et sont colinéaires, c’est-à-dire qu’il existe un réel t telque
 , autrement dit tel que :
, autrement dit tel que :
t est le paramètre de cette représentation.
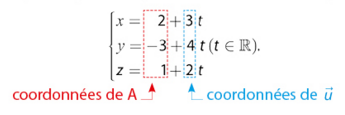
(d) est la droite qui passe par le point  et de vecteur directeur
et de vecteur directeur  ;
;
Une représentation paramétrique de d est
2. Utiliser une représentation paramétrique.
Une droite (d) admet une infinité de représentations paramétriques.En effet, on peut choisir un point de (d) autre que A ou choisir un vecteur non nul colinéaire à et autre que .
On reprend l’exemple du paragraphe 1 .
• Le point  (obtenu pour
(obtenu pour  ) appartient à (d), donc une autre représentation paramétrique de (d) est :
) appartient à (d), donc une autre représentation paramétrique de (d) est :
 .
.
• Le vecteur  est un autre vecteur directeur de (d), donc une autre représentation paramétrique de (d) est :
est un autre vecteur directeur de (d), donc une autre représentation paramétrique de (d) est :
 .
.
Par un raisonnement analogue à celui du paragraphe 1, on obtient une représentation paramétrique d’un plan à partir d’un de ses points et d’un couple de vecteurs non colinéaires de ce plan.
II. Équations cartésiennes d’un plan.
1. Vecteur normal à un plan.
 est normal à un plan
est normal à un plan  signifie que
signifie quetoute droite de vecteur directeur
est orthogonale au plan .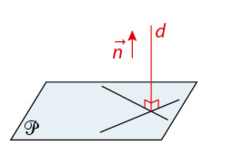
est un vecteur non nul.L’ensemble des points M de l’espace tels que
 est le plan passant par A et de vecteur normal .
est le plan passant par A et de vecteur normal .On note B le point distinct de A tel que  et H le projeté orthogonal d’un point M sur la droite (AB).
et H le projeté orthogonal d’un point M sur la droite (AB).
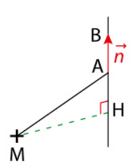
Avec ces notations :

Ainsi si, et seulement si,  , c’est-à-dire A = H car les vecteurs
, c’est-à-dire A = H car les vecteurs 
et  sont colinéaires.
sont colinéaires.
Autrement dit, si, et seulement si, A est le projeté orthogonal de M sur la droite (AB).
L’ensemble cherché est donc le plan passant par A et orthogonal à (AB).
2. Équations cartésiennes d’un plan.
1. Un plan de vecteur normal
 a une équation de la forme
a une équation de la forme  , où d désigne
, où d désigneun nombre réel.On dit que c’est une équation cartésienne de ce plan.
2. Réciproquement, a, b, c et d étant quatre nombres réels donnés avec a, b et c non tous nuls, l’ensemble des points
 tels que est un plan de vecteur normal .
tels que est un plan de vecteur normal .1. Un point appartient au plan passant par  et de
et de
vecteur normal si, et seulement si, , c’est-à-dire ;
 .
.
En posant  , on obtient
, on obtient  .
.
2.  est l’ensemble des points qui vérifie
est l’ensemble des points qui vérifie
où a, b et c sont des nombres réels non tous nuls.
On peut supposer, par exemple,  .
.
Le point  est alors un point de et l’équation équivaut à
est alors un point de et l’équation équivaut à  ,
,
c’est-à-dire
avec .
est donc le plan passant par A et de vecteur normal .
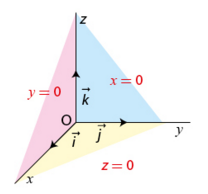
3. Cas particuliers des plans (xOy), (yOz) et (xOz).
• Le plan  passe par l’origine
passe par l’origine  du repère et le vecteur
du repère et le vecteur  est un vecteur normal à ce plan.
est un vecteur normal à ce plan.
Ainsi, une équation cartésienne du plan est de la forme  .
.
Or, appartient à donc  et
et  .
.
Ainsi, une équation cartésienne du plan est  .
.
• De même, le plan  a pour équation cartésienne
a pour équation cartésienne  et le plan
et le plan  a pour équation cartésienne
a pour équation cartésienne  .
.
III. Traduire un problème par un système d’équations linéaires.
1. Déterminer l’intersection de deux droites.
Dans un repère orthonormé, on se propose de démontrer que les droites (d) et (d’) de représentations paramétriques respectives :
 et
et  sont sécantes.
sont sécantes.
Les droites (d) et (d’) sont sécantes si, et seulement si, le système ci-dessous de six équations
à cinq inconnues  a une seule solution.
a une seule solution.
Autrement dit, (d) et (d’) sont sécantes si, et seulement si, il existe un unique couple  tel que :
tel que :
 c’est-à-dire
c’est-à-dire 
Pour résoudre ce système (T) de trois équations à deux inconnues, on commence par résoudre un système formé par deux de ces équations, par exemple (1) et (2) comme ci-dessous.
Ce système ayant un seul couple solution, on vérifie qu’il est aussi solution de (3).
On conclut que ce couple est solution de (T).
• Par addition membre à membre des équations (1) et (2), on obtient  soit
soit  .
.
• On remplace t par 4 dans l’équation (1), on obtient 
soit  .
.
• On vérifie que les valeurs de t et t’ obtenues sont solutions de l’équation (3) :
 .
.
• On remplace t par 4 dans le système (S) ou  par
par  dans
dans  et on obtient les coordonnées du point d’intersection de (d) et (d’) :
et on obtient les coordonnées du point d’intersection de (d) et (d’) :  .
.
Il est important de noter l’utilité d’avoir nommé différemment les paramètres t et t’. En effet, le
point commun M à (d) et (d’) est atteint sur (d) pour  , alors qu’il est atteint sur (d’) pour .
, alors qu’il est atteint sur (d’) pour .
2. Étudier l’intersection d’une droite et d’un plan.
Dans un repère orthonormé, le plan a pour équation cartésienne 
et la droite  pour représentation paramétrique :
pour représentation paramétrique :
On se propose d’étudier l’intersection du plan et de la droite .
Pour cela, on résout le système  ci-dessous de quatre équations à quatre inconnues
ci-dessous de quatre équations à quatre inconnues  .
.
Ce système équivaut à :
 c’est-à-dire
c’est-à-dire 
Or, la quatrième équation n’a pas de solution donc le système (S) n’a pas de solution.
La droite (d) et le plan n’ont pas de point commun, donc (d) est strictement parallèle à .
Télécharger et imprimer ce document en PDF gratuitement :
Vous avez la possibilité de télécharger puis d'imprimer gratuitement ce document «représentation paramétrique et équation cartésienne : cours de maths en terminale en PDF.» au format PDF.
Ressources de terminale
Cours de terminale

Exercices de terminale




D'autres cours et exercices à consulter

L'équipe Mathovore
12 Enseignants Titulaires
Collectif d'enseignants titulaires de l'Éducation Nationale, spécialisés en mathématiques en primaire, au collège, au lycée et post-bac.
Notre équipe collaborative enrichit constamment nos ressources pédagogiques.
Nos applications
Téléchargez gratuitement la dernière version de nos applications.



